本文是康红普院士“煤巷智能快速掘进技术与装备的发展方向”的阅读笔记。该文发表于《采矿与岩层控制工程学报》,探讨了煤巷智能快速掘进技术与装备的研究现状、存在问题,高屋建瓴的提出了未来发展方向和技术框架。
-
研究现状:
-
巷道掘进的重要性:巷道掘进是井工煤矿的重要生产环节,对实现安全高效开采至关重要。近年来,工作面自动化、智能化开采技术的发展对巷道掘进提出了更高要求,包括提高掘进速度、减少作业人员、改善作业环境等。
-
影响掘进速度的因素:巷道掘进速度主要取决于巷道地质与生产条件、掘进工艺与设备、支护形式、参数、工艺及设备、运输系统以及各个环节的相互匹配性。
-
存在问题:
-
超前探测:探测距离短、精度低、速度慢,影响正常作业,地质数据不全面,可视化程度低。
-
掘进控制:掘进机单机自动化程度低,多机协同作业能力差,整体开机率较低。
-
支护:临时支护主动性、及时性较差,缺乏煤帮临时支护,锚杆(索)施工工艺复杂,高度依赖人工,支护占用时间长,难以实现自动化,支护与掘进设备协同性差。
-
运输:支护材料的运输高度依赖人工,用人多,劳动强度高,辅助运输已成为制约快速掘进的难题之一。
-
控制:掘进、支护、运输等设备之间缺乏有效的通信手段,装备离散、工艺不连续,协同控制理论基础薄弱,装备群协同控制系统水平较低。
-
监测:缺乏对掘进机、支护装备工况的实时、在线监测,缺乏随掘空顶区稳定性监测,缺乏巷道全生命周期全方位、多源数据、实时精准监测系统,缺乏监测数据快速分析、反馈算法,不能及时指导支护设计的优化。
-
发展方向:
-
总体目标:根据我国煤矿不同地质条件,开展煤巷快速掘进技术与装备集中攻关,使掘进与支护作业由依赖人工到全面机械化、自动化、智能化,实现减人、提效。
-
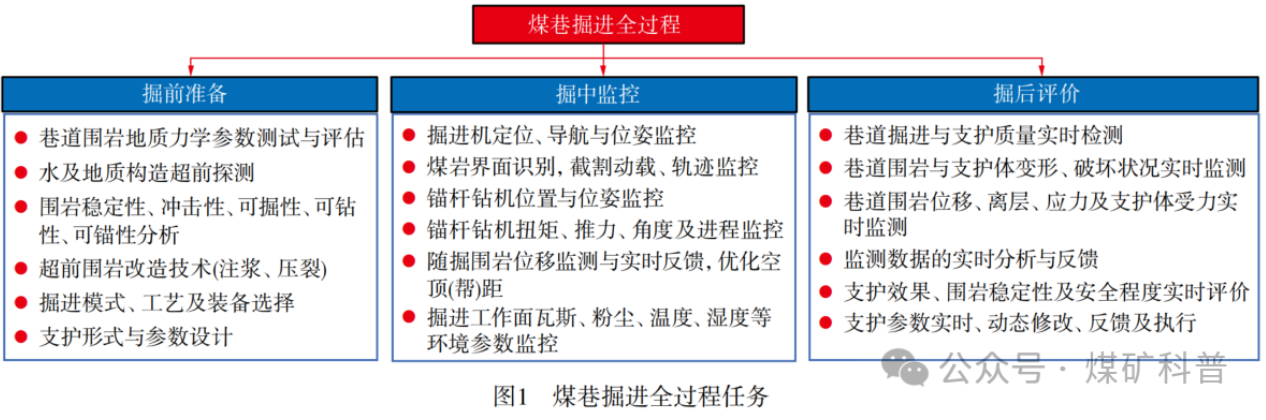
掘进全过程任务:包括掘前准备、掘中监控、掘后评价。掘前准备要进行地质力学测试与评估,分析围岩稳定性等;掘中监控要实时监测围岩条件变化等;掘后评价要进行施工质量检测与矿压监测等。
-
掘进模式:根据我国煤巷地质条件提出 5 种模式,对于稳定巷道,优先采用掘锚一体化机组;对于一般条件、断面较小的巷道,可采用小型化的掘锚一体化机组;对于不稳定巷道,可采用悬臂式掘进机配有效临时支护和机载锚杆钻机的方式。
-
自动化、智能化框架:将超前探测、掘进、支护、运输、通风、降尘等全系统进行自动化、智能化升级,以提高掘进速度与效率,实现智能、高效、少人甚至无人。包括快速、准确的围岩地质力学参数获取技术,掘进装备高精度定位、导航技术仪器,自动化、智能化截割技术,临时支护技术, 锚杆、锚索自动化施工技术与装备, 锚杆、锚索自动化施工技术与装备,巷道围岩稳定性自主评价与动态智能支护设计。
免责声明:本文转载自煤矿科普,版权归原作者所有。所发内容不代表本网站立场,如有侵权请联系删除。